
もし大企業に「その発想は実用的でない」と言われた日、あなたはその夜に何をするだろうか?
1987年、写真家のRichard Greenhillはその問いにこう答えた――アパートに戻り、廃材と医学テキストを広げ、週に一度の秘密の実験会を始めた。その産物が、空気圧「Air-Muscles」で動くヒューマノイドロボット「Shadow Walker」だ。
本記事では、IEEE Spectrumの一次情報を軸に、40年前の手作りDIYプロジェクトがなぜ現代AI・ロボティクスの文脈で再び輝くのか、その創造プロセスを丸ごと解剖する。
📌 この記事でわかること
- 写真家Greenhillが企業の否定を乗り越えShadow Walkerを作り上げた背景
- 「Air-Muscles(空気筋肉)」がモーター駆動より優れている技術的根拠
- DIYエンジニアリング文化がPhysical AI時代の競争優位になる理由
- 日本のロボット産業が「製品化優先」文化から学ぶべき逆転の発想
① 1987年のガレージロボット革命――なぜ独学者が企業を超えたか

話はイギリス・ロンドンのとある会社「Intergalactic Robots」への売り込みから始まる。Richard Greenhillは写真家だった。ロボット工学の学位も、機械工学の実績もない。それでも彼は、自分のロボットのアイデアを持ち込んだ。返ってきた答えは、端的に言えば「面白いが実用的ではない」という否定だった。
ここで多くの人間は引き下がる。しかしGreenhill は違うベクターを選んだ。組織の外に出て、自分のルールで作ることだ。
「Shadow Group」――週一の実験会が生んだエコシステム
彼が立ち上げたのは、毎週水曜夜に集まるDIYコミュニティ「Shadow Group」だ。特定のスキルセットは問わない。エンジニア、アーティスト、学生、元工場労働者――最終的に約12人が定期的に集い、ジャンク部品を持ち寄り、実験と失敗を繰り返した。
この12という数字は小さく見えるかもしれない。だが組織論の観点から見れば、意思決定コストが最小化され、試行サイクルが最速になる人数帯だ。Googleの「Project Aristotle」研究でも指摘された通り、小規模な高信頼チームが最もイノベーティブなアウトプットを出す。Shadow Groupはその実例を、1987年の時点で体現していた。
部品のほとんどはスクラップヤードとジャンクショップから調達した。素材選定の基準は「動くかどうか」と「安いかどうか」のみ。制約こそが設計の自由度を生む、という逆説がここでも機能した。
医学テキストを「設計書」にした逆転発想
最も革新的だったのは、設計の参照先だ。GreenHillと共同開発者のRich Buckleyは、ロボット工学の教科書ではなく、人体解剖の医学テキストを開いた。「人間はどうやって腕を動かしているのか」を生物学的に理解し、そのまま機械に翻訳しようとしたのである。
この「生物学からの直訳」という方法論は、現代のバイオミメティクス(生物模倣工学)そのものだ。40年前の独学者が、当時の主流エンジニアリングをスキップして最先端の概念に到達していた事実は、視点の多様性がいかに技術的飛躍を生むかを示している。
関連記事:ロボット産業のChatGPT時代は来るのか──2025年投資$40.7Bの熱狂と実用化の壁を冷徹に読む
② 空気圧「Air-Muscles」がモーター駆動を超える理由
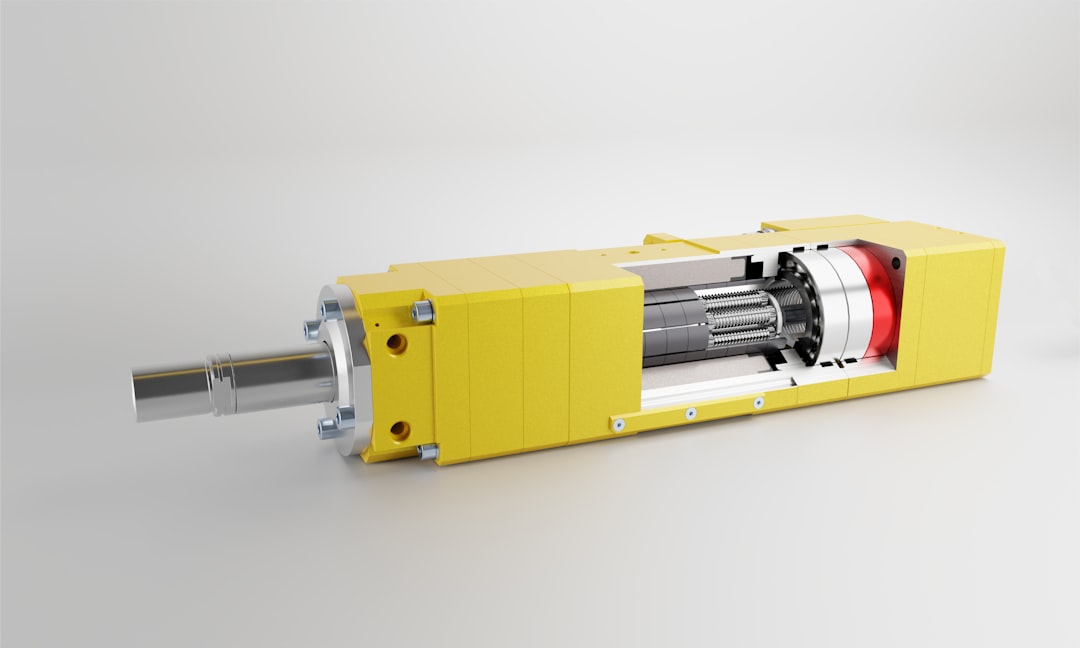
Shadow Walkerの心臓部は、モーターではなく「Air-Muscles(空気筋肉)」と呼ばれる空気圧アクチュエーターだ。この選択が、ロボット工学の文脈で今なお注目される理由を技術的に掘り下げよう。
「コンプライアンス特性」が生む自然な動き
従来のモーター駆動ロボットは、精密な位置制御を得意とする一方で「硬さ」が課題だ。外部から力が加わると抵抗し、関節が壊れるか相手(人間)を傷つけるリスクがある。これを専門用語で「低コンプライアンス特性」と呼ぶ。コンプライアンスとは「外力に対して柔軟に順応する能力」のことで、人間の筋肉が持つ本質的な性質だ。
Air-Musclesはゴムチューブ製のアクチュエーターだ。内部に空気圧をかけると収縮し、抜くと伸張する。この動作が人間の筋肉の収縮・弛緩と構造的に酷似している。ゴムチューブアクチュエーターとは、気密性の高い弾性チューブに圧縮空気を送り込むことで、モーターを使わずに力を発生させる部品を指す。
結果として生まれるのは「柔らかく、衝撃を吸収する」動作だ。人間と物理的に接触する場面、たとえば介護ロボットや共同作業ロボット(コボット)においては、このコンプライアンス特性が安全性の根幹をなす。
| 比較項目 | モーター駆動 | Air-Muscles(空気圧駆動) |
|---|---|---|
| 動作の柔軟性 | 低い(剛体的) | 高い(弾性・コンプライアンス大) |
| 出力重量比 | 中程度 | 非常に高い(軽量で強力) |
| 製造コスト | 高い(精密部品) | 低い(ゴムチューブ+空気配管) |
| 人間との共存安全性 | 要追加設計(トルク制限等) | 構造的に高い |
| 制御の複雑さ | デジタル制御が容易 | 空気圧制御が必要(非線形) |
| バイオミメティクス適合性 | 低い | 高い(筋肉構造と同一原理) |
3Dプリント時代との「意外な親和性」
Air-Muscles の構造は驚くほどシンプルだ。ゴムチューブ、金属の端末部品、空気の配管――これだけで基本構造が成立する。この「低コスト・シンプル構造」という特徴は、3Dプリンターが普及した現代のDIYエコシステムと絶妙に噛み合う。
端末部品や支持構造を3Dプリントし、ゴムチューブと組み合わせるだけで、自宅でAir-Muscles の試作ができる環境が今は整っている。1987年にGreenhill が直面していた「製造コストの壁」は、2024年には実質的に消滅しつつある。
安全上の注意:空気圧アクチュエーターは、接続部の破損や圧力過多により急激な動作不良・部品飛散のリスクがある。DIYで試作する場合は必ず適切な圧力レギュレーターを使用し、耐圧規格を確認した配管部品を選定すること。空気圧回路は電気回路と異なり、失圧時の動作が予測困難な場合があるため、初期テストは低圧(0.1〜0.3 MPa以下)から始めることを強く推奨する。
「私たちは工学の教科書ではなく、人体解剖の医学書を参照した。機械が人間のように動くなら、人間の構造から学ぶのが最も合理的だと思ったのだ。」
— Richard Greenhill, Shadow Walker 開発者 / IEEE Spectrum インタビューより
③ DIYエンジニアリング文化が次のAI時代を創る
2024年のロボティクス投資は$15.2Bに達した(PitchBook / SVB Intelligence)。しかしその多くは、すでに実証された技術の「スケールアップ」に向かっている。本当に新しいものはどこから来るのか。
大企業の「実用性フィルター」が見落とすもの
大企業のR&D部門には「ゲートレビュー」と呼ばれる関門がある。アイデアが次のフェーズに進むには、市場規模・ROI・競合優位性の証明が求められる。これは資本効率の観点から合理的だ。しかし同時に、「まだ証明できないが本質的に正しいアイデア」を確実に葬る。
GreenHillが1987年に直面した「実用的でない」という否定は、この構造の典型例だ。Air-Musclesの概念は当時、ロボットへの応用実績がなかった。実績がないから証明できない。証明できないから投資されない。しかし概念自体の正しさは40年後に証明された。
DIYコミュニティはこのフィルターの外側で動く。失敗コストが低く、評価基準が「面白いかどうか」だからだ。MIT Media Labの調査では、スタートアップハードウェア企業の85%が「既存部品の再組み合わせ」から革新を生んでいることが示されている。再組み合わせの自由度は、制約の少ないDIY環境で最大化する。
オープンソースハードウェアが「個人の武器」を底上げする
今日のDIYエンジニアが1987年のGreenHillと決定的に違う点がある。それは情報とツールの民主化だ。ArduinoとROS(Robot Operating System)の組み合わせで、10万円以下の予算でプロトタイプロボットが作れる。GitHubには数千のロボティクスリポジトリが公開されており、世界中の「週末エンジニア」が知識を共有している。
DIYロボット開発の現代的プロセスフロー
-
1
生物学・医学・自然からの着想
Shadow Walkerのように、教科書の外から設計思想を調達する。昆虫の歩行パターン、人体の関節構造、植物の成長アルゴリズムが現代ロボティクスの設計源になっている。
-
2
最小コストでの試作(MVP Hardware)
3Dプリンター・Arduino・既製センサーを組み合わせた最小構成で動作検証。失敗コストを極小化し、週単位でイテレーションを回す。
-
3
コミュニティへの公開とフィードバック
GitHub・Hackaday・地域のMakerSpaceでプロセスを公開。Shadow Groupが週一の実験会で行っていた「集合知活用」を、デジタル環境で加速させる。
-
4
AIツールによる設計の高速化
生成AIを使った制御コードの自動生成、シミュレーション環境(Gazebo・MuJoCo)での仮想テスト。1987年に数ヶ月かかった試行錯誤が数日に短縮される。
-
5
商用化・特許化・スタートアップ化の判断
動作が証明された段階で初めて「実用性」を検討する。DIYフェーズでは実用性を問わないことが、このプロセスの最重要ルールだ。
このフローが機能する前提は、「失敗を恥とみなさない文化」だ。日本のものづくり文化は品質と精度の面で世界最高水準だが、「完成していないものを見せる」という実験的公開姿勢は苦手領域とされてきた。ここに、次章で論じる日本への示唆がある。
関連記事:ロボット団体制御のAIエージェント革命──米国防研究所が示すビジネスへの応用
🔧 Air-Musclesとロボット制御を自分で試したい方へ
Arduino+ROSを使ったロボット制御の基礎から実装まで学べる「Complete Guide to Robot Operating System (ROS)」は、実際のプロジェクトベースで空気圧・モーター制御の両方を扱う人気講座です。Shadow Walkerのような実験精神で始めたい方に最適です。
④ 独学者の「敗北」が社会実装を生む――ビジネスパーソンへのメッセージ

Shadow Walkerは商業的な成功を収めたプロダクトではない。Greenhill は富豪になっていないし、彼のロボットが量産されてもいない。では、この40年間の実験は「失敗」だったのか。答えは明確に否だ。
40年前のアナログが最新研究の指針になる理由
現在、Boston DynamicsのAtlas、Figure AIのFigure 02、Agility RoboticsのDigitなど、次世代ヒューマノイドロボットの多くが「コンプライアンス制御」を設計の核心に置いている。空気圧式ではなくモーター+トルクセンサーによる実装が主流だが、設計哲学の根っこはGreenHillが1987年に選んだ「柔らかさ」と同じだ。
GreenHillは先を行きすぎていた。それだけのことだ。しかし「先を行きすぎた実験」は、後の世代がその正しさを証明したとき、最も強力な先行研究になる。
Physical AI時代に「手作り試行錯誤」が競争優位になる逆説
「Physical AI」とは、デジタル空間だけでなく物理世界で動作するAIシステムを指す概念だ。NVIDIA のJensen Huang が2024年のCESで提唱し、ロボティクス・自動運転・製造自動化の文脈で急速に普及している。Physical AIの開発には、ソフトウェアのみの開発と本質的に異なる要素がある――それは「物理的な試行錯誤」の経験だ。
センサーのキャリブレーション誤差、モーターのバックラッシュ、関節の摩擦特性……これらはシミュレーションでは再現しきれない。実際に手を動かして失敗した経験を持つエンジニアは、シミュレーション上がりの開発者が見落とすポイントを直感的に察知する。DIY経験は、Physical AI時代の「センス」を養う最短経路だ。
「未経験者の視点」こそイノベーションの火種
GreenHillは写真家だった。写真家がロボットを作るとき、他のエンジニアには見えない視点が入る。「どう見えるか」「どう動きが美しいか」という審美的判断が、機能設計に混入する。
これは偶発的な強みだ。AIスタートアップの世界でも同様の事例は多い。元シェフがフードテックを革新し、元映画監督がVRコンテンツ制作パイプラインを再設計した。専門知識の欠如は弱点ではなく、既存の「常識の呪縛」からの解放を意味する場合がある。
日本のロボット産業は製造精度と品質管理で世界をリードしてきた。しかし「まだ使えないものを作って公開する」という実験文化の厚みは、シリコンバレーやロンドンのDIYコミュニティに比べて薄い。この差が、次の10年でどう響いてくるか。Shadow Walkerの歴史は、その答えの一端を教えてくれる。
関連記事:IEEE「次世代エンジニア育成プログラム」7大学に拡大──AI・ロボティクス教育の国際競争が始まった
まとめ:今すぐ動くための3ステップ
1987年のGreenHillに学べることは、技術の話だけではない。「組織に否定された」「専門知識がない」「お金がない」という三重苦の中でも、週に一度集まって手を動かし続けた行動原則こそが、40年後に語り継がれる成果を生んだ。
- ステップ1――着想の「禁止区域」を外す:ロボット工学の問いに生物学・医学・アート・料理から答えを探す習慣を持つ。専門書よりも「全く異なる分野の教科書」を買うことから始めよう。
- ステップ2――12人以下の実験コミュニティを作る:週一でもいい。目的は「完成品を作ること」ではなく「失敗を面白がれる場を持つこと」だ。Discordグループでも、地元のMakerSpaceでも構わない。
- ステップ3――Physical AIの文脈で自分の経験を再定義する:過去に試作した電子工作、ドローン制御、3Dプリントの経験は、Physical AI時代に希少な「物理的センス」として直接換算できる。その価値を今すぐ棚卸しし、次のプロジェクトへの橋渡しにせよ。
関連記事
このトピックをさらに深く理解するために
-
→
ロボット産業のChatGPT時代は来るのか──2025年投資$40.7Bの熱狂と実用化の壁を冷徹に読む -
→
ロボット団体制御のAIエージェント革命──米国防研究所が示すビジネスへの応用 -
→
IEEE「次世代エンジニア育成プログラム」7大学に拡大──AI・ロボティクス教育の国際競争が始まった
参考・出典
- This DIY Bipedal Robot Used Pneumatic ‘Air-Muscles’ Instead of Motors(IEEE Spectrum, 2024)
- MIT Media Lab Research – Hardware Innovation Studies(MIT Media Lab, 2023)
- 2024 Annual Global Robotics Report(PitchBook / SVB Intelligence, 2024)
- Robotics Coverage – Hardware Startup Ecosystem(TechCrunch, 2024)
- What Is Compliant Robotics? – Compliance in Robot Design(Rethink Robotics, 2023)
- Shadow Robot Company – History and Heritage(Shadow Robot Company, 2024)



